Tecnologie e sistemi avanzati

 IMBARCAZIONI DA COMPETIZIONE
IMBARCAZIONI DA COMPETIZIONE
Costruita da studenti del Politecnico di Torino, EVA è il prototipo di una barca a vela da regata ad alte prestazioni, realizzata con materiali innovativi ed ecosostenibili
16.10.2015
Testo dell’articolo
Il regolamento prevede che le imbarcazioni siano progettate e realizzate nell’ambito delle Università, e che rispettino le dimensioni di 4,60 m di lunghezza, 2,10 m di larghezza, 33 m2 di vela, imponendo l’uso di materiali sostenibili per gli scafi e dell’alluminio per l’armo. In particolare viene richiesto un contenuto in legno, o materiali di origine vegetale e/o animale, non inferiore al 70% del proprio peso
EVA ha uno scafo di 4,53 m, una larghezza fuori tutto con terrazze di 2 m, una larghezza massima dello scafo di 1,4 m, un peso armato di 100 kg e una superficie velica totale di 32 m2 (randa 12,5 m2, fiocco 3,5 m2, gennaker 16 m2).
Lo studio fluidodinamico e strutturale è stato svolto con software dedicati, mentre la sua realizzazione ha coinvolto tecnologie e lavorazioni analoghe a quelle dei moderni cantieri, tra cui laminazione ed infusione sottovuoto di materiali compositi.
L’imbarcazione è stata costruita con materiali innovativi e naturali: lo scafo è realizzato con un “sandwich” di balsa e fibra di lino, mentre per la coperta e la struttura interna è stato utilizzato il compensato marino okoumé e la fibra di vetro. In entrambi i casi si è scelto di sperimentare una resina epossidica realizzata con materie prime provenienti da materiali riciclati e biomasse.
Testo redatto su fonte Politecnico di Torino dell’8 ottobre 2015
Image credit: Polito Sailing Team/Politecnico di Torino, 2015
© Copyright ADEPRON – Riproduzione riservata
 MEZZI ROBOTICI MARINI
MEZZI ROBOTICI MARINI
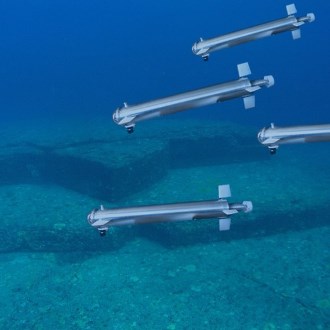
Sviluppato “Venus Swarm”, un avanzato sistema a “sciame denso” di robot bio-inspired, concepito per compiti di controllo, monitoraggio e sicurezza dei fondali marini
03.10.2015
Testo dell’articolo
Nello specifico, diversamente delle attuali applicazioni in cui ogni dispositivo naviga a centinaia di metri l’uno dall’altro, il sistema si caratterizza per una formazione robotica a “sciame denso”, ovvero prevede l’utilizzo di decine di droni che si muovono mantenendo una reciproca distanza di pochi metri. I singoli robot comunicano tra loro mediante un sistema wireless sottomarino (in cui essi fungono da nodi di rete) basato sull’utilizzo di luce e suono: il sistema ottico permette di trasmettere rapidamente una grande quantità di informazioni, ma solo in acque molto pulite e a brevi distanze, mentre il sistema acustico, anch’esso riprogettato specificamente per questa speciale configurazione, ha minori prestazioni, ma presenta il vantaggio di poter essere utilizzabile in acque torbide e a brevi distanze.
Per potenziare le prestazioni di “dialogo” tra robot e dello scambio di informazioni verso la superficie, i ricercatori stanno puntando allo sviluppo di una vera e propria “autostrada digitale sottomarina”. Questo lo si otterrà dotando Venus Swarm di una tecnologia ibrida costituita da un innovativo modem multicanale ottico-acustico che, sfruttando la stretta sinergia tra i canali utilizzati e la ridotta distanza, permetterà al sistema di comunicazione di raggiungere valori di trasmissione dell’ordine di Mbit/s, con straordinari miglioramenti rispetto alle attuali possibilità.
Nell’ambito del controllo e ispezione dei fondali di zone costiere e acque oceaniche, l’utilizzo degli sciami robotici con le caratteristiche di Venus Swarm offre grandissimi vantaggi rispetto all’impiego di sistemi robotici singoli e sofisticati, ma molto costosi. In particolare Venus Swarm potrebbe venire impiegato per il monitoraggio del MOSE (il sistema di schiere di paratoie mobili installate sui fondali delle tre bocche di porto della Laguna di Venezia in grado di isolarla dal mare durante gli eventi di alta marea), ovvero con compiti di sorveglianza delle strutture offshore, come piattaforme petrolifere, gasdotti e porti che potrebbero essere bersaglio di sabotaggi e potenziali attentati terroristici (attualmente l’accesso ai porti viene controllato solo dalla superficie, ma Venus Swarm sarebbe in grado di rilevare un eventuale attacco proveniente anche dai fondali).
Il sistema, inoltre, potrebbe trovare utilissime applicazioni nell’ambito del soccorso in mare (relativamente alla gestione dei flussi migratori), del monitoraggio dell’ambiente marino (ad esempio per salvaguardia di fauna e flora sottomarine e nel controllo dell’inquinamento delle acque) e della ricerca di relitti o reperti archeologici sommersi.
Testo redatto su fonte ENEA dell’1 ottobre 2015
Per approfondimenti: Determination of Spatial Configuration of an Underwater Swarm with Minimum Data – International Journal of Advanced Robotic Systems | 09.09.2015
Image credit: International Journal of Advanced Robotic Systems (2015) DOI: 10.5772/61035, Ramiro dell’Erba/ENEA
© Copyright ADEPRON – Riproduzione riservata
 RICERCA E INNOVAZIONE
RICERCA E INNOVAZIONE
“Vessels for the Future”, l’iniziativa dell’industria naval-meccanica europea che mira a promuovere la ricerca e l’innovazione nello sviluppo delle navi del futuro
06.02.2015
Testo dell’articolo
Tale strategia prevede non solo di fornire all’Europa un sistema dei trasporti competitivo, efficiente e sostenibile, all’avanguardia e fortemente innovativo, ma anche un sistema in grado di produrre un impatto positivo sull’occupazione e sulla competitività globale dell’economia europea. Si prevede, infatti, che nel 2050 l’Europa utilizzerà in maniera sempre più intensiva il proprio spazio marittimo e fluviale non solo per il trasporto a scopi commerciali e turistici, ma anche per la generazione di energia, lo sfruttamento minerario, la produzione alimentare e per nuove soluzioni abitative. Lo sviluppo sostenibile di attività marittime e scenari operativi sempre più complessi ed estesi va perseguito nel rispetto dell’ambiente e con elevati standard di sicurezza, mediante l’introduzione di nuove tecnologie e la formazione di personale altamente specializzato.
“Vessels for the Future” si propone di instaurare un partenariato pubblico-privato (PPP, Public Private Partnership) con la Commissione Europea, indirizzando la ricerca marittima europea nel programma “Horizon 2020” sui temi principali relativi alla competitività, alla sostenibilità ambientale e alla sicurezza. I partner di “Vessels for the Future” hanno già identificato i temi prioritari di innovazione da proporre nei bandi 2016-17 di Horizon 2020, coerenti con gli indirizzi strategici europei in ambito marittimo, tra i quali l’efficienza energetica, i combustibili alternativi, la sicurezza, l’impiego di nuovi materiali e di tecnologie per la gestione operativa di navi complesse ad elevato valore aggiunto (navi passeggeri e mezzi offshore) che sono i prodotti di eccellenza realizzati nei cantieri europei.
Testo redatto su fonte Fincantieri S.p.A. del 4 febbraio 2015
Per approfondimenti: www.seaeurope.eu
Image credit: Rolls-Royce
© Copyright ADEPRON – Riproduzione riservata
 TECNOLOGIE MARINE
TECNOLOGIE MARINE
Progetto MARINET: presso l’INSEAN-CNR sono stati completati i test di prova del più grande modello di turbina mai sperimentato al mondo in un bacino idrodinamico
14.12.2014
Testo dell’articolo
Grazie alle notevoli dimensioni del bacino rettilineo (470 m di lunghezza, 13,5 m di larghezza e una profondità di 6,5 m), i test hanno permesso, di indagare e documentare con accuratezza fenomeni come l’interazione tra le pale della turbina e la superficie dell’acqua, finora semplicemente osservati nel corso di prove in mare dai ricercatori della Queen’s University di Belfast – istituzione partner del progetto – a Portaferry, a sud di Belfast. Ora è stato possibile confrontare le prestazioni dello stesso modello sia in condizioni reali, sia nell’ambiente controllato. L’Europa è all’avanguardia nel campo della ricerca e delle tecnologie per la produzione di energie pulite dal mare. La Comunità, a fronte di una stima di produzione di energia marina di 3,6 GW entro il 2020, si pone l’obiettivo di arrivare a ben 188 GW, oltre 50 volte tanto, entro il 2050, un valore pari al 15% del consumo totale UE. L’International Energy Agency ha stimato per il 2050 una produzione di energia mondiale proveniente dall’ambiente marino di circa 750 GW, di cui almeno 100 derivanti dai mari che circondano i paesi europei.
Testo redatto su fonte CNR/Francesco Salvatore/Marina Landolfi del 10 dicembre 2014
Per approfondimenti: www.fp7-marinet.eu
Image credit: CNR
© Copyright ADEPRON – Riproduzione riservata
 INNOVAZIONE TECNOLOGICA
INNOVAZIONE TECNOLOGICA
Sviluppato un metodo che consente di progettare in 3D vele “perfette”, capaci di garantire le migliori performance anche nelle condizioni meteorologiche più difficili
27.11.2014
Testo dell’articolo
Testo redatto su fonte Politecnico di Milano del 25 novembre 2014
Image credit: CSCL
© Copyright ADEPRON – Riproduzione riservata
 MEZZI ROBOTICI MARINI
MEZZI ROBOTICI MARINI
I robot bioispirati dei progetti OCTOPUS e PoseiDRONE sono gli apripista di una nuova frontiera della robotica che pone la ricerca italiana all’avanguardia nel mondo
04.08.2014
Testo dell’articolo
Se normalmente il robot viene percepito come un’entità rigida, l’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa, nel laboratorio ospitato proprio sul mare, allo “Scoglio della Regina”, sta vincendo una nuova sfida: contribuire allo sviluppo di robot “flessibili”, morbidi, scattanti e agili proprio come un polpo. Ispirandosi a questa creatura marina è partito il progetto europeo “Octopus”, oggi concluso, coordinato dal Direttore Vicario dell’Istituto di BioRobotica Cecilia Laschi, insieme al Direttore Paolo Dario. Ma è iniziata una nuova sfida e lo studio della soft robotics continua: restano infatti da sviluppare, ad esempio, tutte le possibili applicazioni, le prime delle quali sono state presentate in anteprima in alcuni convegni scientifici internazionali.
I progetti OCTOPUS e PoseiDRONE sono robot “bioispirati”, ovvero progettati grazie all’osservazione della natura, per coglierne i principi fondamentali e per trasformarli in nuove tecnologie. OCTOPUS, in particolare, è un robot ispirato al polpo, realizzato con materiali morbidi, capace di deformarsi per raggiungere con facilità aree non accessibili, di muoversi su diversi tipi di fondali e di manipolare oggetti. Obiettivo del progetto, finanziato dall’Unione Europea, era quello di comprendere i segreti che nascondono la destrezza del polpo, per riprodurli in una nuova tipologia di robot marini dal “corpo” morbido, consentendo lo sviluppo di applicazioni marine con finalità di pulizia, esplorazione, monitoraggio delle acque e anche in operazioni di soccorso. PoseiDRONE, invece, è realizzato per la maggior parte con materiali “gommosi”. Questa caratteristica, insieme alla flessibilità, gli permette di sopportare urti violenti senza riportare danni o ammaccature. OCTOPUS e PoseiDRONE sono gli apripista della nuova generazione di robot flessibili, nuova frontiera della robotica che la Scuola Superiore Sant’Anna ha contribuito a far sviluppare.
Testo redatto su fonte Scuola Superiore Sant’Anna di Pisa del 30 luglio 2014
Per approfondimenti su OCTOPUS e PoseiDRONE: www.octopus-project.eu – sssa.bioroboticsinstitute.it/projects/PoseiDRONE
Image credit: The Biorobotics Institute/PoseiDRONE
© Copyright ADEPRON – Riproduzione riservata
 VEICOLI SUBACQUEI
VEICOLI SUBACQUEI
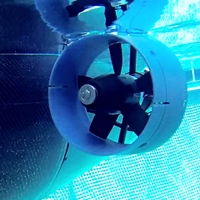
V-FIDES, il progetto per lo sviluppo di una nuova generazione di veicoli subacquei in grado di poter operare sia come veicoli autonomi, che a controllo remoto
13.07.2014
Testo dell’articolo
Il progetto, co-finanziato dalla Regione Toscana e sviluppato da un consorzio guidato da WASS (Whitehead Alenia Sistemi Subacquei) con la partecipazione della società Kayser Italia (Livorno) e della Scuola Superiore Sant’Anna di Pisa, è supportato da un gruppo di specialisti fra cui Compolab (Livorno), CRM (Livorno) ed il Polo dei Sistemi Logistici dell’Università di Pisa.
V-FIDES sarà impiegato per svolgere diversi tipi di missioni, come ad esempio:
– esplorazione del fondale marino;
– monitoraggio di impianti civili;
– monitoraggio ambientale fisico/chimico di tratti di mare;
– prospezione archeologica;
– nodo mobile per comunicazioni subacquee;
– semplici operazioni robotiche (pulizia, micro-carotaggio, campionamento delle acque).
V-FIDES è dotato del Power Distribution Module (PDM), un dispositivo in grado di gestire, convertire e distribuire la potenza ai vari sottosistemi, limitando il consumo totale del veicolo e quindi aumentando la possibile durata delle missioni. Il PDM implementerà un monitoraggio continuo dei consumi dei diversi sottosistemi. In caso di bisogno, ogni singolo modulo potrà essere isolato, permettendo la continuazione della missione anche in caso di problemi.
Lo scorso 21 maggio, presso la vasca esterna dello stabilimento WASS di Livorno, si è tenuta la prima prova con accensione dei motori del veicolo subacqueo filoguidato V-FIDES che, seppur attaccato al carroponte, ha fatto registrare durante l’immersione l’ottimale accensione dei suoi sette motori (in maniera sia singola che collettiva) ed effettuato dei piccoli spostamenti. A queste prime prove ne seguiranno altre che valuteranno nuovamente l’accensione dei motori oltre alla stabilità della batteria e alle prove di bilanciamento, al fine di testare l’affidabilità del veicolo e consentirne una prova in mare da effettuare, secondo i programmi, entro il prossimo mese di luglio.
Testo redatto su fonte Gruppo Finmeccanica
Image credit: FINMECCANICA
© Copyright ADEPRON – Riproduzione riservata
 INNOVAZIONE TECNOLOGICA
INNOVAZIONE TECNOLOGICA
Innovation Challenge: presentati i due progetti di innovazione tecnologica navale più meritevoli che saranno finanziati fino alla fase di industrializzazione
12.06.2014
Testo dell’articolo
Rivestimenti biomimetici per riduzione attrito e antifouling
Questo progetto si propone di sviluppare tre diverse tecnologie per la realizzazione di rivestimenti di carena caratterizzati da proprietà “super-idrofobiche”, “idrofiliche” e combinate. L’obiettivo perseguito è la riduzione della resistenza al moto dovuta all’attrito e della formazione di incrostazioni biologiche (bio-fouling), con un target di riduzione del 20% dell’attrito su lastra piana. Inoltre, per avere un benchmark dal punto vista applicativo, i rivestimenti sviluppati verranno confrontati sperimentalmente con un prodotto commerciale di riferimento.
Shipboard Virtual Networking and Computing
Il progetto ha come obiettivo la progettazione e la realizzazione di un prototipo dimostrativo di Infrastruttura di Rete Unificata basata sul paradigma innovativo delle Software Defined Networks. Tale prototipo verrà utilizzato per l’individuazione di soluzioni progettuali e buone pratiche per la realizzazione delle infrastrutture di rete e di calcolo virtuali a bordo nave. Il risultato che si intende perseguire vuole essere una risposta all’esigenza di integrare su un unico framework di rete tutti i diversi sotto-sistemi di una nave che supportano funzioni estremamente eterogenee, dal controllo e automazione dei sistemi vitali di bordo sino ai sistemi di intrattenimento dei passeggeri. Tali sistemi sono accomunati dalla necessità di appoggiarsi su un’infrastruttura di comunicazione e di elaborazione dati in grado di garantire elevati livelli di affidabilità e sicurezza, flessibilità e capacità di riconfigurazione, supporto al traffico dati eterogeneo, efficienza energetica.
Innovation Challenge si pone come il primo esempio nel suo genere in Italia, profondamente innovativo sia sul piano del processo che su quello degli obiettivi. L’investimento di Fincantieri, che supererà i 500.000 euro complessivi, si rivolge ai docenti e ai ricercatori della Scuola Politecnica dell’Università ed è finalizzato alla selezione di progetti di innovazione tecnologica navale destinati all’industrializzazione. CETENA, società del gruppo Fincantieri, nella funzione di “ponte” tra il mondo industriale e quello accademico che riveste abitualmente, in questa occasione ha collaborato alla valutazione dei progetti, ha coordinato le molteplici attività del processo e presidierà la fase di industrializzazione.
La valutazione delle proposte ha privilegiato la qualità scientifica e tecnologica, la validità degli obiettivi e l’impatto dei risultati in termini di futura applicazione su prodotti e processi di Fincantieri. Dopo una call for ideas tra i 5 dipartimenti della Scuola Politecnica di Genova, nel novembre scorso ha preso avvio la prima fase di valutazione, al termine della quale sono state individuate sei proposte che hanno ricevuto da parte di Fincantieri un finanziamento di 15.000 euro ciascuna per tradursi in progetti di ricerca industriale. Tra questi sei progetti, tutti ritenuti ben sviluppati e di grande interesse per i loro contenuti, i due annunciati oggi sono stati giudicati i più meritevoli sotto il profilo dell’innovazione e saranno sostenuti e finanziati ulteriormente fino alla fase di industrializzazione.
La cooperazione tra azienda e ateneo è focalizzata sulla valorizzazione delle migliori idee provenienti dall’Università, per giungere a innovazioni di prodotto sui temi chiave per la competitività di Fincantieri. I principali campi in cui si sono sviluppate le proposte sono stati infatti l’impatto ambientale, l’efficienza energetica, la riduzione dei costi operativi, il comfort, la qualità percepita e la riduzione dei costi di allestimento.
Testo redatto su fonte Fincantieri S.p.A. del 10 giugno 2014
© Copyright ADEPRON – Riproduzione riservata
 MEZZI ROBOTICI MARINI
MEZZI ROBOTICI MARINI
INFN: grazie a un robot sottomarino filoguidato da una nave in superficie, si sono concluse con successo le operazioni di posa di una delle strutture del progetto “KM3NeT”
08.05.2014
Testo dell’articolo
“La nuova struttura a ‘stringa’ è stata deposta utilizzando un ‘veicolo di lancio’ sferico del diametro di 2 m, attorno al quale era stata completamente avvolta, – spiega Leismueller – e, in meno di 10 ore, è stata ancorata a 3.500 m di profondità e connessa al cavo sottomarino principale grazie a un ROV, cioè un robot sottomarino filoguidato dalla nave”. “Infine, grazie a un sofisticato sistema di trasporto della potenza elettrica e dei dati sul cavo elettro-ottico, la stringa è stata accesa e quindi ‘srotolata’ fino a raggiungere la configurazione finale: tutte le operazioni sono state svolte da un team multidisciplinare costituito da ricercatori e tecnologi INFN e personale specializzato della nave Nautical Tide”, conclude Leismueller.
“La campagna in mare era iniziata lo scorso 1° maggio, ma abbiamo dovuto attendere per iniziare la posa dello strumento per le cattive condizioni del mare, – spiega Marco Circella della Sezione INFN di Bari e coordinatore tecnico di KM3NeT Europa – poi, finalmente, ieri sera le onde si sono calmate e abbiamo potuto iniziare le delicatissime operazioni, che si sono concluse all’alba, dopo una nottata di lavoro e tensione, nel migliore dei modi”. “Il dispositivo installato si basa su una nuova tecnologia rispetto alla prima torre installata nel marzo 2013, – precisa Circella – infatti consiste in una stringa costituita da un cavo elettro-ottico, lungo circa 200 m su cui sono collegati sensibilissimi ‘occhi elettronici’ per rivelare la scia luminosa prodotta dai neutrini sott’acqua”. “Anche questo secondo modulo del telescopio è stato poi collegato al cavo di comunicazione in fibra ottica che, dagli abissi, porta in tempo reale i dati registrati dai sensori fino alla stazione di terra di Portopalo di Capo Passero dei Laboratori del Sud dell’INFN”, conclude Circella.
Le operazioni sono state condotte dalla collaborazione internazionale KM3NeT, che vede in prima fila l’Italia con l’Istituto Nazionale di Fisica Nucleare e in particolare i Laboratori Nazionali del Sud. “Questo è indubbiamente un grande successo della scienza e della tecnologia”, commenta Giacomo Cuttone, direttore dei Laboratori Nazionali del Sud dell’INFN. “Ora si possono ritenere concluse tutte le operazioni preliminari e quindi si può procedere alla produzione finale di tutti i rivelatori. Entro la primavera del prossimo anno sarà completata la loro installazione”, conclude Cuttone. Questa attività si svolge nell’ambito del progetto italiano approvato dal MIUR sul programma PON Ricerca e Competitività e finanziato dalla UE, per il potenziamento delle infrastrutture di ricerca nelle regioni meridionali.
La struttura installata si affianca alla prima torre del telescopio, alta 450 m, deposta nel lo scorso anno. “La torre, ora in funzione, oltre al successo tecnologico in quanto strumento efficientissimo per le ricerche di fisica di base, si è confermato anche un ottimo dispositivo per ricerche interdisciplinari – commenta Giorgio Riccobene dei Laboratori del Sud dell’INFN, anche lui a bordo della nave, “perché oltre ad aver misurato il flusso di muoni cosmici a profondità record, ha permesso di monitorare le proprietà fisiche e oceanografiche del sito abissale scelto e, grazie a un’antenna di sensori acustici, ha permesso di studiare il transito di capodogli al largo della Sicilia”.
Nella sua configurazione finale l’esperimento sarà costituito da una ‘selva’ di un centinaio di strutture, che formeranno una griglia del volume di circa un chilometro cubo. Le torri fungeranno da supporto per decine di migliaia di sensori ottici (fotomoltiplicatori), ‘occhi’ elettronici sensibilissimi che formeranno un’antenna sottomarina in grado di rilevare la scia luminosa azzurrina (chiamata “luce Cherenkov”) prodotta dalle rare interazioni dei neutrini di origine astrofisica con l’acqua di mare. Il complesso di torri costituirà quindi un telescopio per neutrini cosmici di alta energia, che provengono dal centro della nostra galassia, dopo aver attraversato lo spazio profondo e tutta la Terra, portando con sé informazioni pressoché intatte sulle loro sorgenti.
Testo redatto su fonte INFN del 7 maggio 2014
Per approfondimenti su KM3NeT: www.km3net.org
Image credit: KM3NeT
© Copyright ADEPRON – Riproduzione riservata
 MEZZI ROBOTICI MARINI
MEZZI ROBOTICI MARINI
CADDY, il progetto di un sistema robotico sottomarino a navigazione autonoma, sarà dotato di funzionalità avanzate per assistere i subacquei in immersione
12.02.2014
Testo dell’articolo
“È un sistema integrato che sfrutta al meglio le capacità cognitive e di apprendimento robotiche”, spiega il direttore dell’ISSIA-CNR Massimo Caccia. “Il robot sottomarino, infatti, non si limita a osservare i movimenti del sub al suo fianco, ma è dotato di funzionalità avanzate che lo rendono molto simile a un compagno umano: sa interpretare eventuali segni di panico, disorientamento o malessere fisico, fornisce un supporto operativo in missione, ad esempio caricando particolari equipaggiamenti, illuminando determinate aree o svolgendo compiti che richiedono agilità e precisione di manovra. E può arrivare a “guidare” la spedizione in aree difficili o lungo specifici percorsi. La presenza di un secondo dispositivo collocato in superficie in prossimità della zona di immersione, poi, rende possibile uno scambio costante di informazioni con il centro di controllo dell’operazione, riducendo molto i rischi”.
Coordinato dall’Università di Zagabria, il progetto riunisce partner da Croazia, Portogallo, Germania, Inghilterra, Austria e Malta. Il contributo dell’Italia riguarda in particolare lo sviluppo di sistemi robotici sottomarini in grado di navigare e manovrare autonomamente, e la messa a punto di un linguaggio di comunicazione tra subacqueo e dispositivi, basato sul riconoscimento dei gesti che comunemente vengono impiegati durante le immersioni. Quest’ultima parte è realizzata con il contributo dell’unità di Genova dell’Istituto di Linguistica Computazionale (ILC) del CNR.
“Abbiamo appena concluso un kick-off meeting del progetto a Zagabria, in cui è stato discusso, tra l’altro, il coinvolgimento operativo di CADDY nell’ambito di una spedizione archeologica sottomarina”, spiega Marco Bibuli dell’ISSIA-CNR. “Il robot guiderà il sub al sito di interesse, osserverà le sue condizioni durante le operazioni, ed eseguirà compiti che richiedono ripetitività e precisione di manovra, quali l’acquisizione di immagini per costruire una mappa visiva della zona di interesse”.
Testo redatto su fonte CNR del 12 febbraio 2014
Per approfondimenti su CADDY: www.caddy-fp7.eu
Image credit: CADDY Project
© Copyright ADEPRON – Riproduzione riservata